
Explorative point clouds
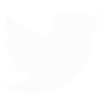
Traditionally point clouds are being used to derive geometric models. These models are then used for all kinds of applications. However, with this intermediary step lots of information is lost. Therefore, Project Pointless enables applications to be built directly on any point cloud.
Walkthrough
The empty space inside a point can be used for many different kinds of applications: on-the-fly pathfinding in point clouds, direct volume calculations, space fitting queries (does a lorry fit under a bridge or a ship through a waterway?). Also, as soon as the empty space is calculated the density of the point cloud is irrelevant since it won't affect the empty spaces inside the point cloud.
Point Cloud
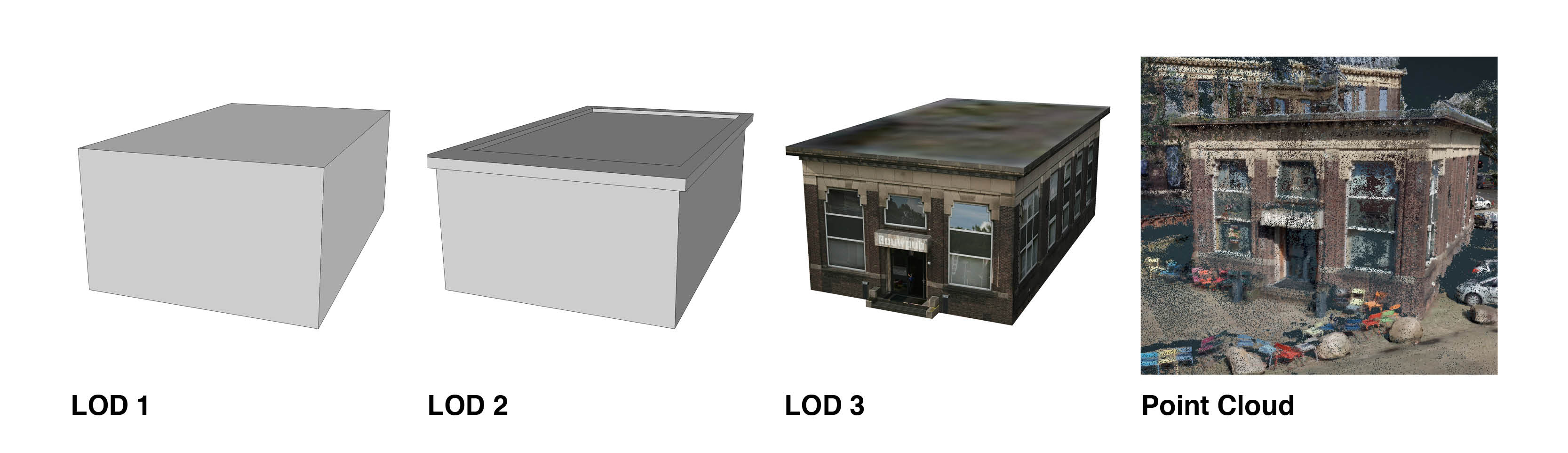
A point cloud will be the input of our application
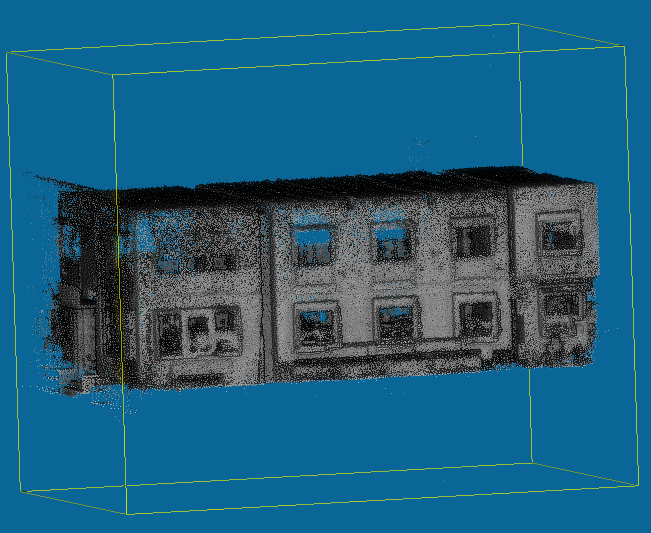
Octree
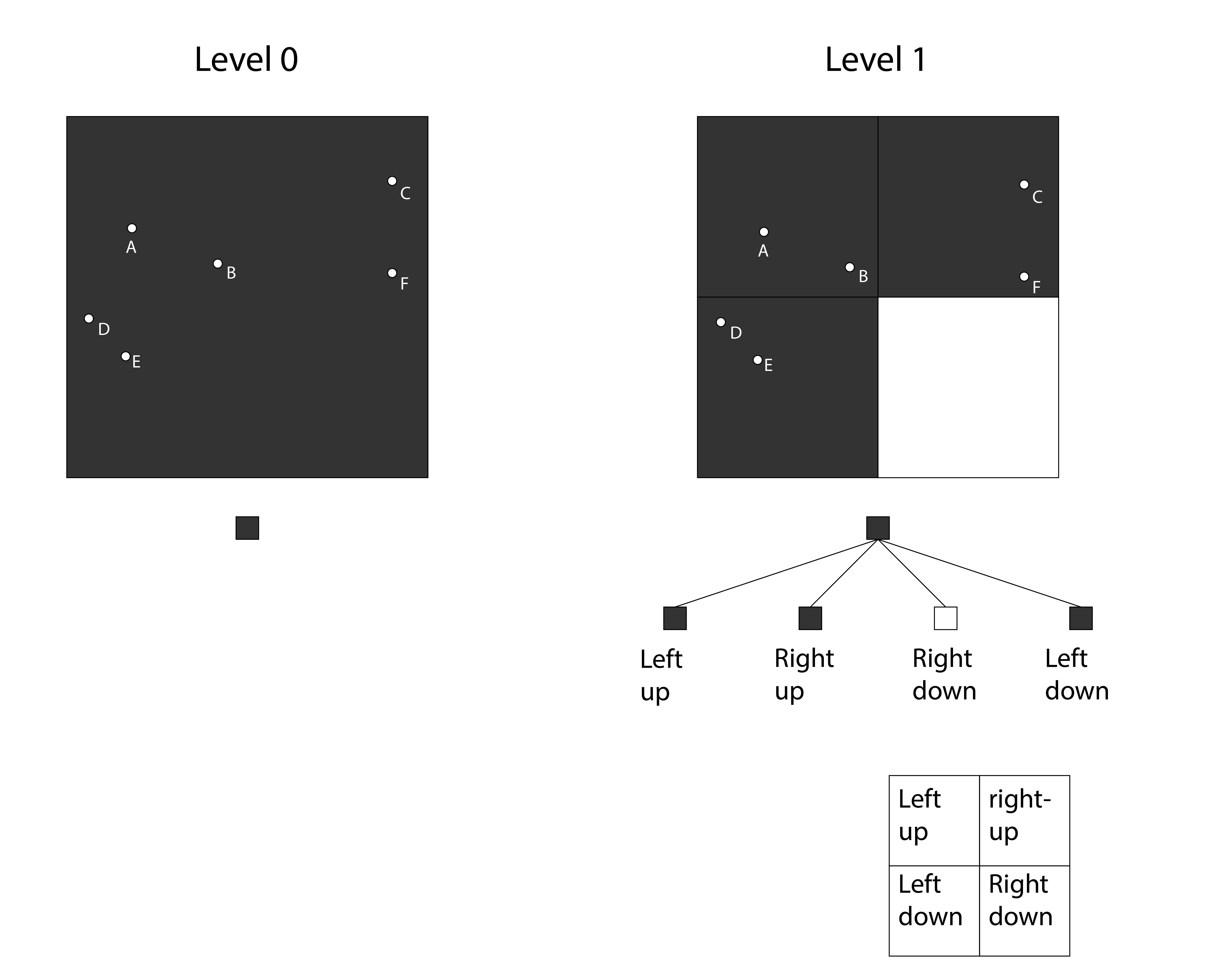
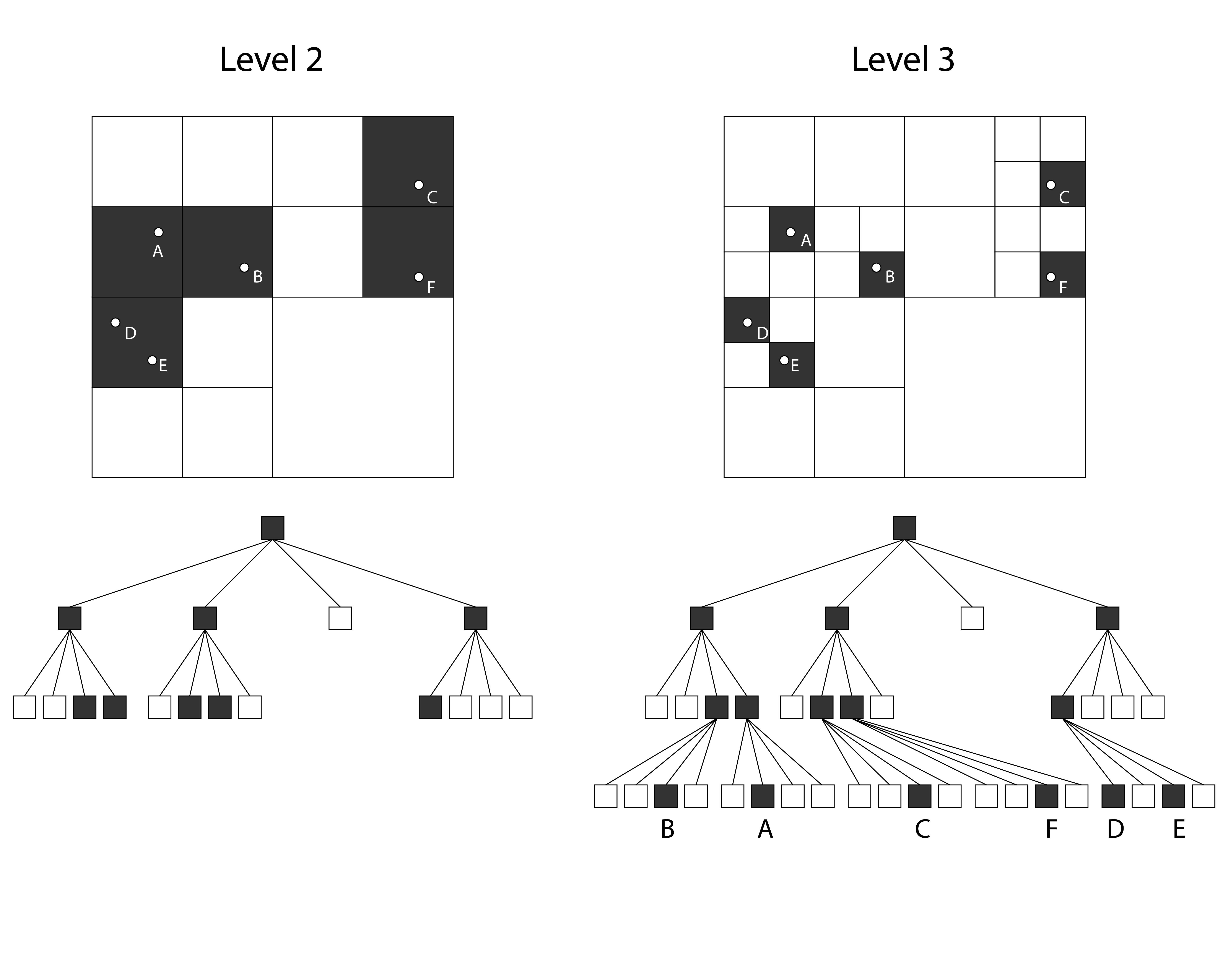
The point cloud will then be stored in a database as an octree. This way clusters of points and clusters of empty space are stored and therefore easy to retrieve
Visualization
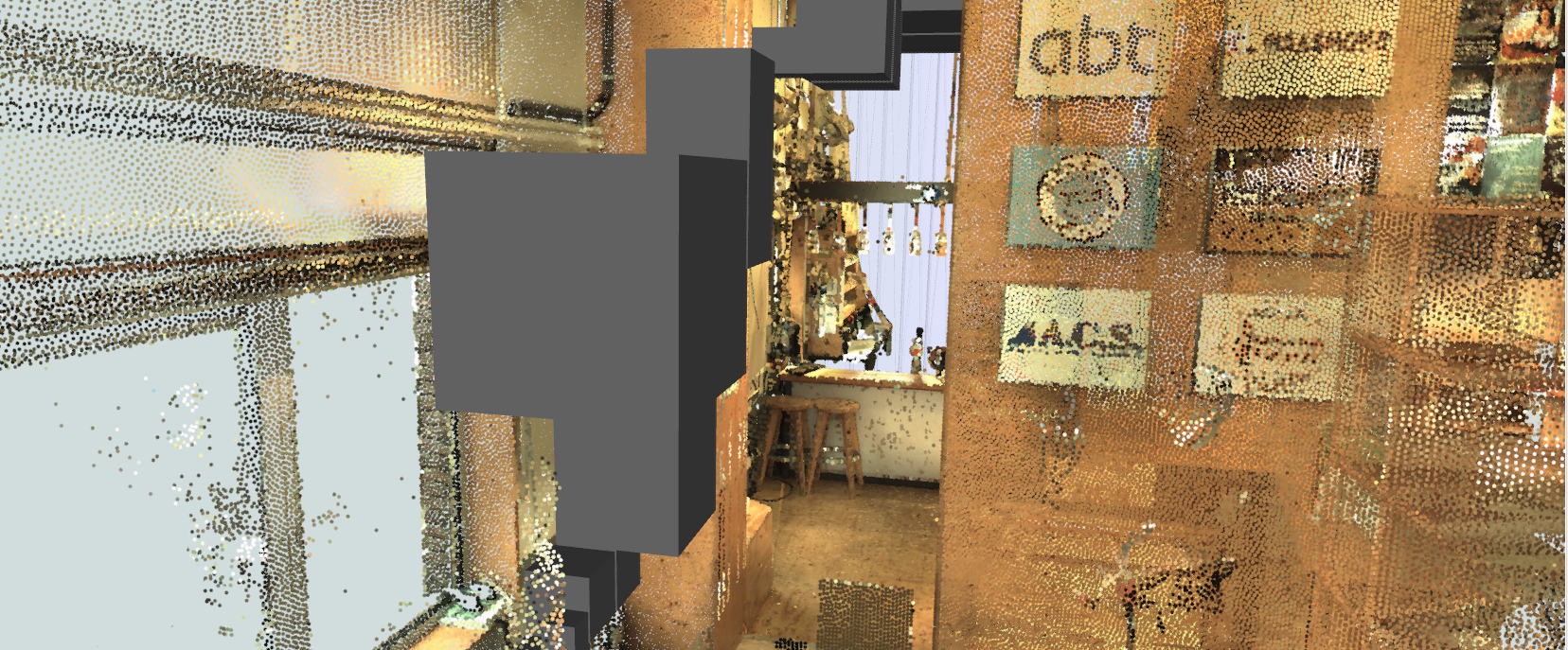
When visualizing the point cloud the mapped open space can be used for showing routes calculated inside the it.

Erik

Florian

Ivo
Olivier

Tom
Contact us
If you have any ideas, suggestions or remarks about project
Pointless, please contact us!
Email: i.deliefde@student.tudelft.nl
Twitter: https://twitter.com/ProjPointless